作者最近在学习keil和ARM,哎,只能感叹自己老了,这里简单的记录下学习笔记吧。
备注:
这里的代码都是作者自己写的,作者刚开始学习ARM,对于汇编和C的混编时的PUSH和POP也不是非常清楚,不能保证正确性。
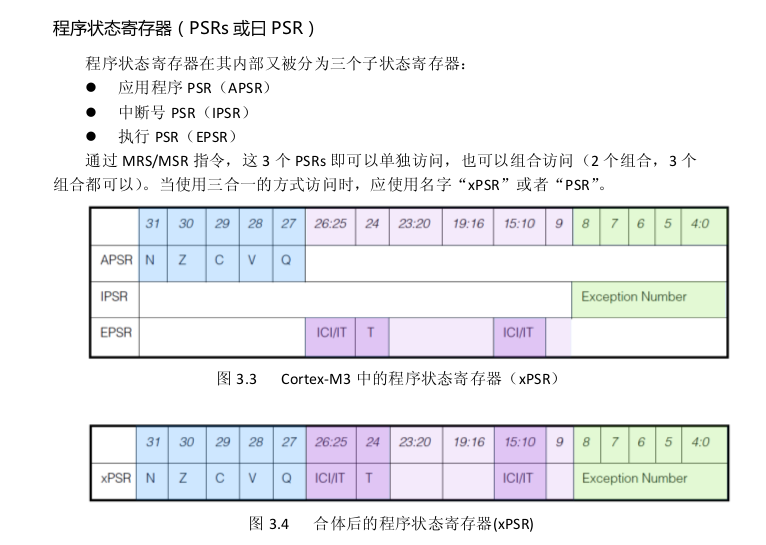
程序状态寄存器如下:
(图片来自《Cortex-M3权威指南》,版权归原作者所有)
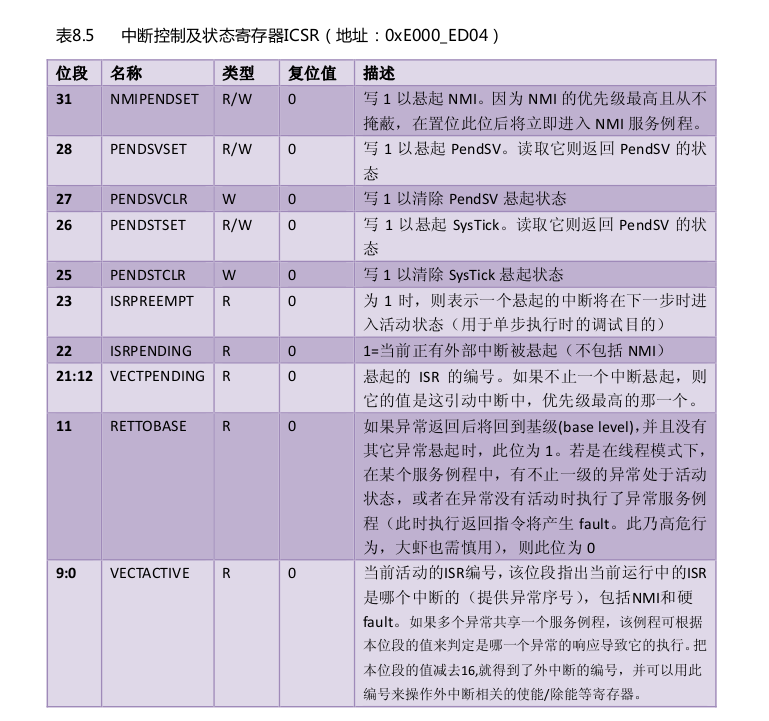
中断控制及状态寄存器ICSR如下:
(图片来自《Cortex-M3权威指南》,版权归原作者所有)
作者的工程基于【ARM学习随手笔记:使用systick定时器】,修改main函数和中断响应函数:
/*
使用嵌入式汇编,没有使用返回值。增加第二个参数是因为这样可以占用掉R1。
*/
__asm void getirq1(int *pIrq, int unused)
{
MRS R1,IPSR
STR R1,[R0,#0x00]
BX LR
}
/*
使用嵌入式汇编,使用返回值,这样R0会被自动占用。
*/
__asm int getirq2()
{
MRS R0,IPSR
BX LR
}
/*
使用内联汇编和虚拟寄存器方式获取IPSR的值,但是M3应该不支持这种语法,但是这里编译通过了,比较奇怪。
*/
int getirq3()
{
int R0;
__asm
{
MRS R0,IPSR
}
return R0;
}
/*
直接访问寄存器
*/
int getirq4()
{
return (*((unsigned int *)0xE000ED04)) &0x3FF;
}
/* SysTick中断响应函数,参考startup_ARMCM3.s */
void SysTick_Handler(void)
{
int irq1,irq2,irq3,irq4;
getirq1(&irq1, 0);
irq2 = getirq2();
irq3 = getirq3();
irq4 = getirq4();
printf("SysTick_Handler Called irq1:%d irq2:%d irq3:%d irq4:%d\n",irq1,irq2,irq3,irq4);
}
int main(void)
{
unsigned int *pControl = (unsigned int *)(0xE000E010);
unsigned int *pReload = (unsigned int *)(0xE000E014);
unsigned int *pCurrent = (unsigned int *)(0xE000E018);
*pControl = 0; //先关闭SysTick
*pReload = 0xFFFFFFF; //设置定时值
*pCurrent = 0; //清理掉当前值
*pControl = 0x7; //启动SysTick
while(1)
;
}
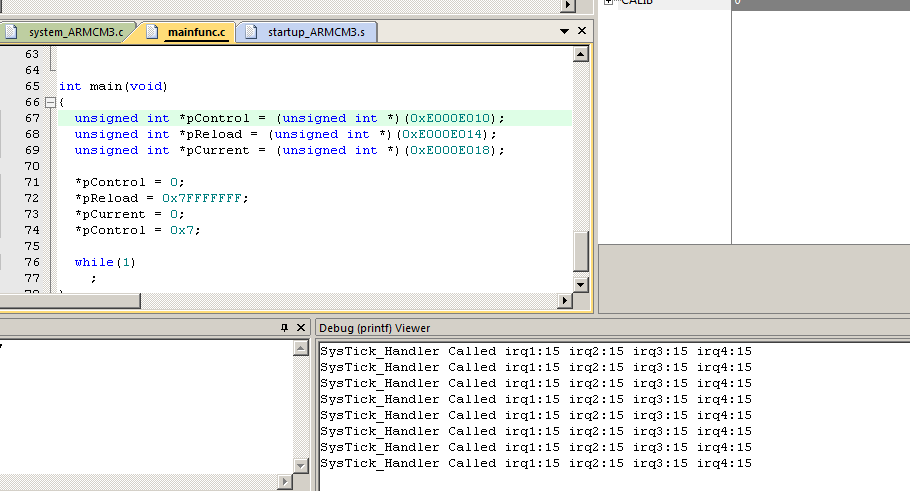
编译执行后使用模拟器运行如下图:
发表评论